FLARES: Fast and Accurate LiDAR Multi-Range Semantic Segmentation
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV 2026)
▶

FLARES: Fast and Accurate LiDAR Multi-Range Semantic Segmentation
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV 2026)
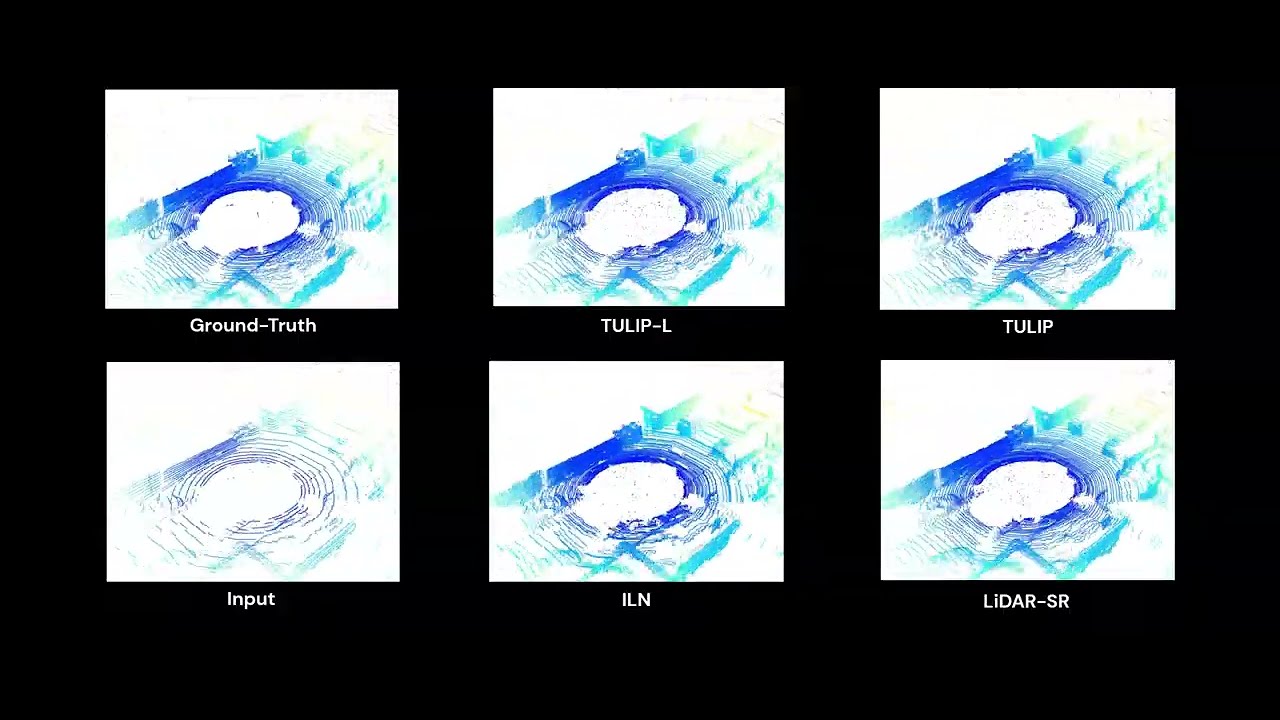
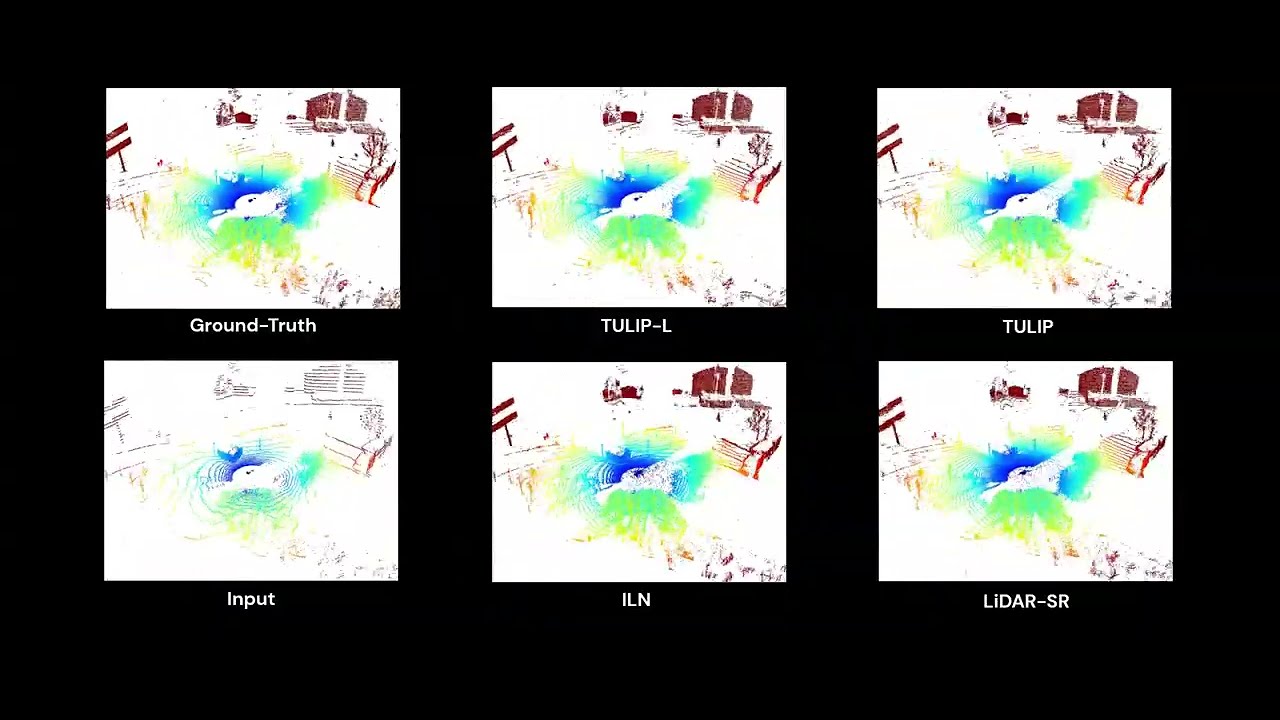
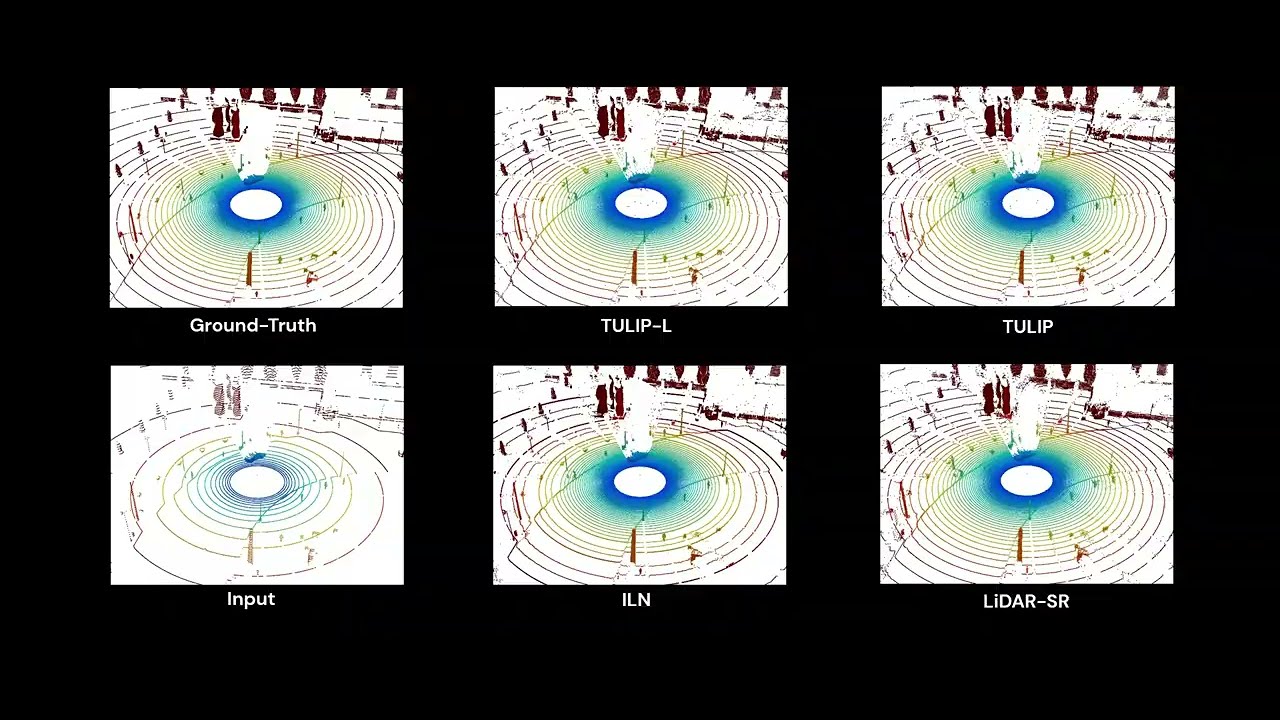
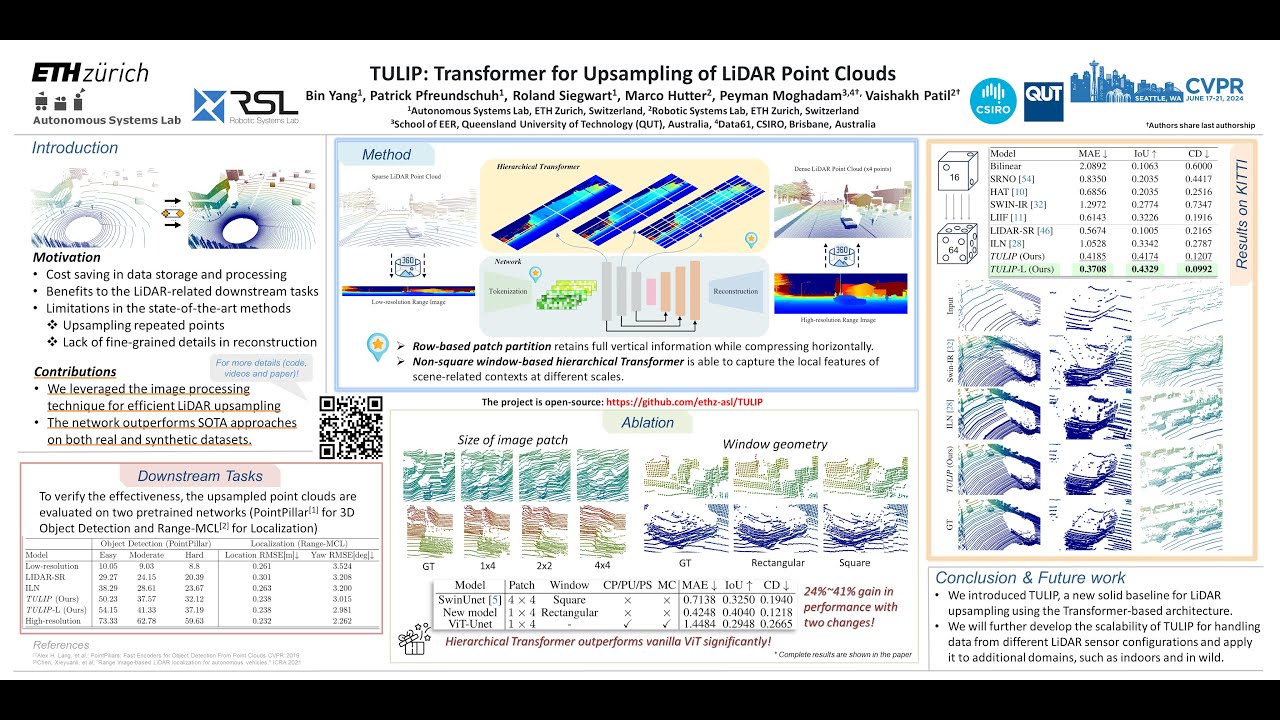
TULIP: Transformer for Upsampling of LiDAR Point Clouds
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2024)
The visualization is done by sampling a time-series subset from the test split.